Tvorba algoritmov pre autonómne systémy – 2. časť
V predchádzajúcej časti sme sa venovali modelovaniu autonómneho systému a jeho simulácií v 3D prostredí. Ak už máme vytvorený dynamický model, ktorý sa dokáže pohybovať v okolí a získavať údaje zo snímačov, môžeme pristúpiť k návrhu autonómnej aplikácie. Tá zvyčajne zahŕňa vnímanie okolia a plánovanie pohybu, kde na tomto základe vieme následne aplikovať riadenie pre naše zariadenia. V ďalších sekciách sa zameriame na dve kľúčové oblasti – vnímanie okolia a plánovanie pohybu.
Komplexné vnímanie okolia
Vnímanie okolia predstavuje schopnosť autonómneho systému identifikovať a interpretovať dianie vo svojom prostredí.
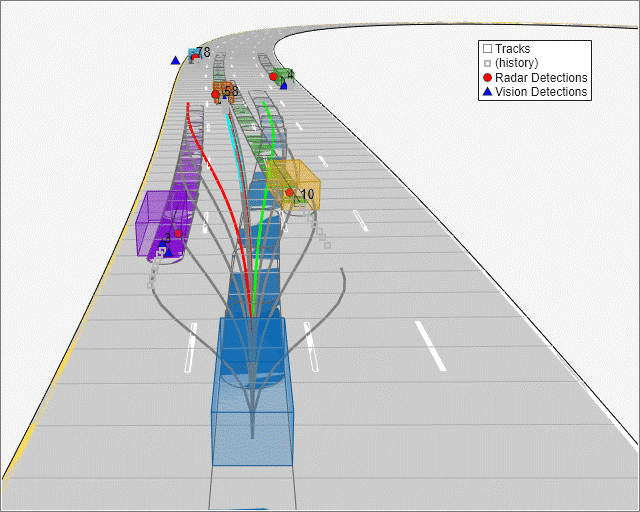
Pri autonómnych vozidlách je potrebné rozpoznať polohu jazdného pruhu a jeho ohraničenia, dopravné značky, ako aj semafory na križovatkách. Rovnako je nevyhnutné detegovať ďalších účastníkov prevádzky – vozidlá, chodcov či cyklistov. V prípade iných autonómnych systémov môže ísť o identifikáciu špecifických objektov, ako sú súčiastky alebo pristávacie plochy. Na komplexné vnímanie okolia sa najčastejšie používajú kamery a lidar, ktoré poskytujú detailné a spoľahlivé informácie o prostredí.
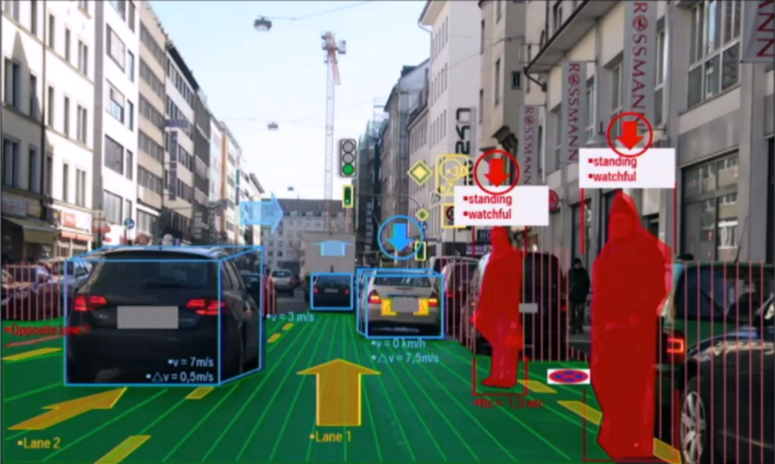
Obr.1 Vnímanie okolia
Kamery
Dáta z kamier tvoria kľúčový prvok pri vnímaní okolia.
Na zvýšenie presnosti spracovania obrazu ponúka MATLAB nástroje na kalibráciu jednej aj viacerých kamier. Medzi typické úlohy pri práci s obrazovými dátami patrí klasifikácia scény, regresia na získanie geometrických vlastností (napríklad určenie zakrivenia čiar), detekcia objektov či sémantická segmentácia, pri ktorej sa jednotlivým pixelom priraďujú významy. Tieto úlohy sa dnes najčastejšie riešia pomocou konvolučných neurónových sietí dostupných v nadstavbe Deep Learning Toolbox. Tento toolbox poskytuje nástroje pre tvorbu sietí, dotrénovanie existujúcich sietí, vizualizáciu a interpretáciu ich výstupov, ako aj možnosti ladenia parametrov. Podporuje taktiež import modelov z iných prostredí, ako sú PyTorch alebo TensorFlow, a ich integráciu do prostredia Simulink na simulácie komplexných systémov. Pre trénovanie neurónových sietí je nevyhnutné mať označené dáta. MATLAB obsahuje viaceré grafické nástroje na popisovanie obrázkov a videí, napríklad aplikáciu Ground Truth Labeler. Označené dáta je možné získavať aj z 3D simulačného prostredia, ktoré realisticky napodobňuje skutočný svet a umožňuje popisovať obrázky automaticky. Situácie, ktoré sa v praxi vyskytujú zriedkavo (napríklad dážď alebo sneženie), je možné doplniť úpravou obrázkov pomocou generatívnej umelej inteligencie.
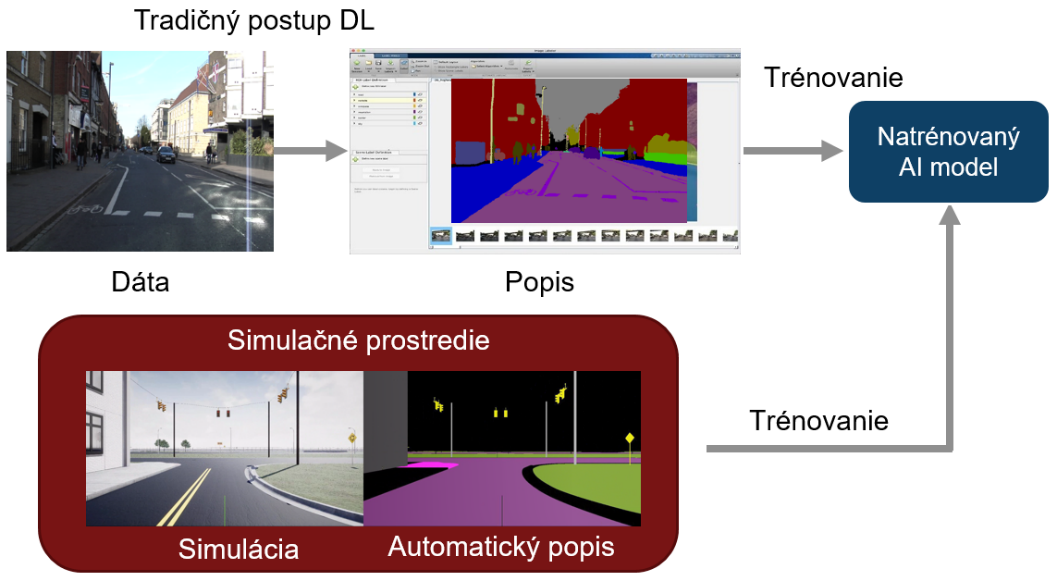
Obr.2 Proces trénovania AI algoritmu
Lidar
Zatiaľ čo obrázky umožňujú dobre rozpoznať a klasifikovať objekty, ich vzdialenosť sa z nich odhaduje podstatne ťažšie.
Preto sa pri vnímaní okolia z hľadiska hĺbky a vzdialeností často využíva lidar. MATLAB pre prácu s lidarovými dátami ponúka nadstavbu Lidar Toolbox. Táto nadstavba umožňuje načítať zaznamenaná dáta z lidaru vo viacerých formátoch a predspracovať ich. Zároveň obsahuje aj aplikáciu na spoločnú kalibráciu kamery a lidaru pre získanie transformácií medzi týmito typmi dát. V toolboxe sú dostupné algoritmy na segmentáciu lidarových dát s využitím predtrénovaných neurónových sietí. Pomocou nich je možné napríklad rozlišovať vegetáciu od budov v leteckých mračnách bodov. V mračnách bodov je rovnako možné detegovať objekty pomocou natrénovaných sietí umelej inteligencie alebo si tieto siete natrénovať z vlastných označených dát v aplikácii Lidar Labeler. Nadstavba Sensor Fusion and Tracking Toolbox poskytuje nástroje pre zlučovanie a sledovanie detekcií z kamery a lidaru viacerých objektov. Umožňuje tak odhad ich polohy, rýchlosti a ďalších dynamických vlastností.
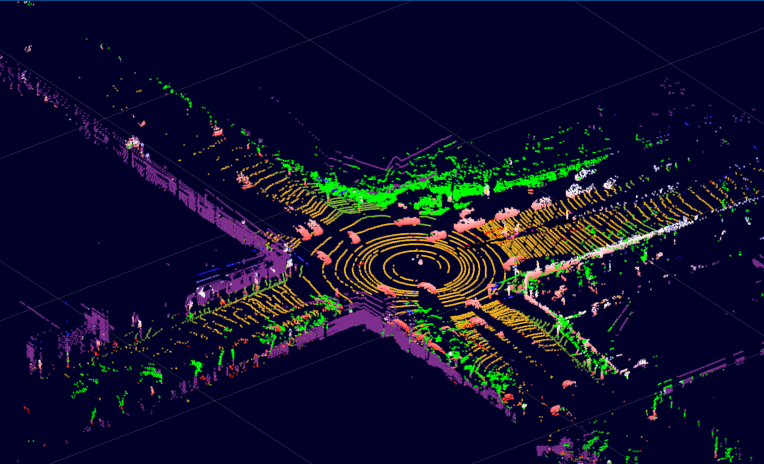
Obr.3 Segmentácia dát z lidaru
Navigácia autonómnych systémov
Po zabezpečení komplexného vnímania okolia nasleduje fáza plánovania pohybov. Pokiaľ máme k dispozícii mapu prostredia, môžeme využiť lokalizačné algoritmy na odhad vlastnej polohy. V neznámom prostredí je možné vytvárať mapu priamo zo snímok lidaru na mapovanie prostredia pomocou 2D alebo 3D okupačných máp. Mapovanie a lokalizáciu možno realizovať aj súčasne, a to pomocou klasických alebo vizuálnych SLAM algoritmov. Všetky spomenuté prístupy sú dostupné v nadstavbe Navigation Toolbox.
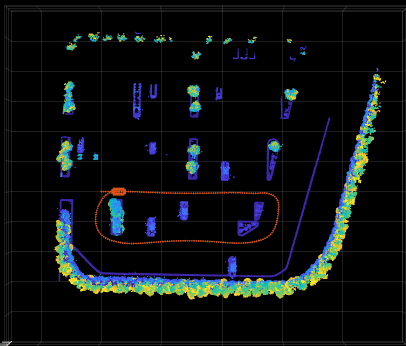
Obr.4 Mapovanie a lokalizácia na parkovisku
V známom, vopred zmapovanom prostredí môžeme využiť rôzne algoritmy na plánovanie trasy a navigáciu. Pre letecké aplikácie sú k dispozícii nástroje na optimalizáciu preletu nad oblasťou záujmu tak, aby bola zabezpečená čo najkratšia dráha pri maximálnom pokrytí. Manipulátory aj drony musia často rešpektovať požiadavky na plynulé spomaľovanie a minimalizáciu trhnutia pohybu. Plánovanie pohybu môže byť globálne alebo lokálne. Globálne plánovanie sa snaží nájsť optimálnu trasu medzi dvoma bodmi v známej mape. Navigation Toolbox ponúka pre globálne plánovanie širokú škálu algoritmov, vrátane RRT, A* a mnohých ďalších. Lokálne plánovanie naopak reaguje na neočakávané prekážky počas pohybu a upravuje trasu v reálnom čase. Na tento účel je možné využiť algoritmy ako Frenet alebo Timed Elastic Band (TEB). Okrem toho je možné vypočítané trasy ďalej optimalizovať či skracovať podľa potreby.
Obr.5 Lokálne plánovanie pohybu
Michal Blaho, 20.11.2025